About Me
🌱 Bio
Hi there 👋 My name is Jiseop Byeon! I’m a 2nd-year master’s student in Mobile Automation and Sensing Systems (MASS) Lab at The University of Texas at Austin under the supervision of Dr. Christian Claudel in the Maseeh Department of Civil, Architectural, and Environmental Engineering. My research focuses on Augmented Reality, Sensors, and Robotics applications for smart and safe civil systems (construction and transportation).
🎓 Education
- M.S. in Civil Engineering — The University of Texas at Austin, Austin, Texas
📆 Aug. 2024 - May. 2026 [Expected] - B.S. in Architectural Engineering — Hanyang University, Seoul, Korea
📆 Mar. 2018 - Feb. 2024
Degree Honors: Summa Cum Laude
Minor: Mechanical Engineering
Exchange Student: University of Michigan — Civil & Environmental Engineering
📆 Aug. 2021 - Dec. 2021
Military Service: Republic of Korea Air Force
📆 Apr. 2019 - Feb. 2021
🤖 Skills
- Languages: Python, C++, C#, MATLAB, R
- Libraries / Frameworks: NumPy, Pandas, PyTorch, Matplotlib, Seaborn, OpenCV
- Design / Tools: Unity, AutoCAD, Revit, SketchUp, Rhinoceros 3D / Git, LaTeX
🏅 Honors and Awards
- U.S.-Korea Fulbright Presidential STEM Initiative Award — Fall 2024 – Spring 2026
- Graduate Dean’s Prestigious Supplement Fellowship — Fall 2025
- George J. Heuer, Jr. Ph.D. Endowed Graduate Fellowship — Fall 2024, Spring 2025
- Corporate-sponsored Scholarship, Duckshin EPC Co., Ltd — Spring 2023
- Merit-based Scholarship, Hanyang University — Spring 2019, Fall 2021, Fall 2022
🔬 Current Research
- ARCAS: Augmented Reality Collision Avoidance System
📆 Jan. 2025 - Present
(In collaboration with Honda Research Institute)
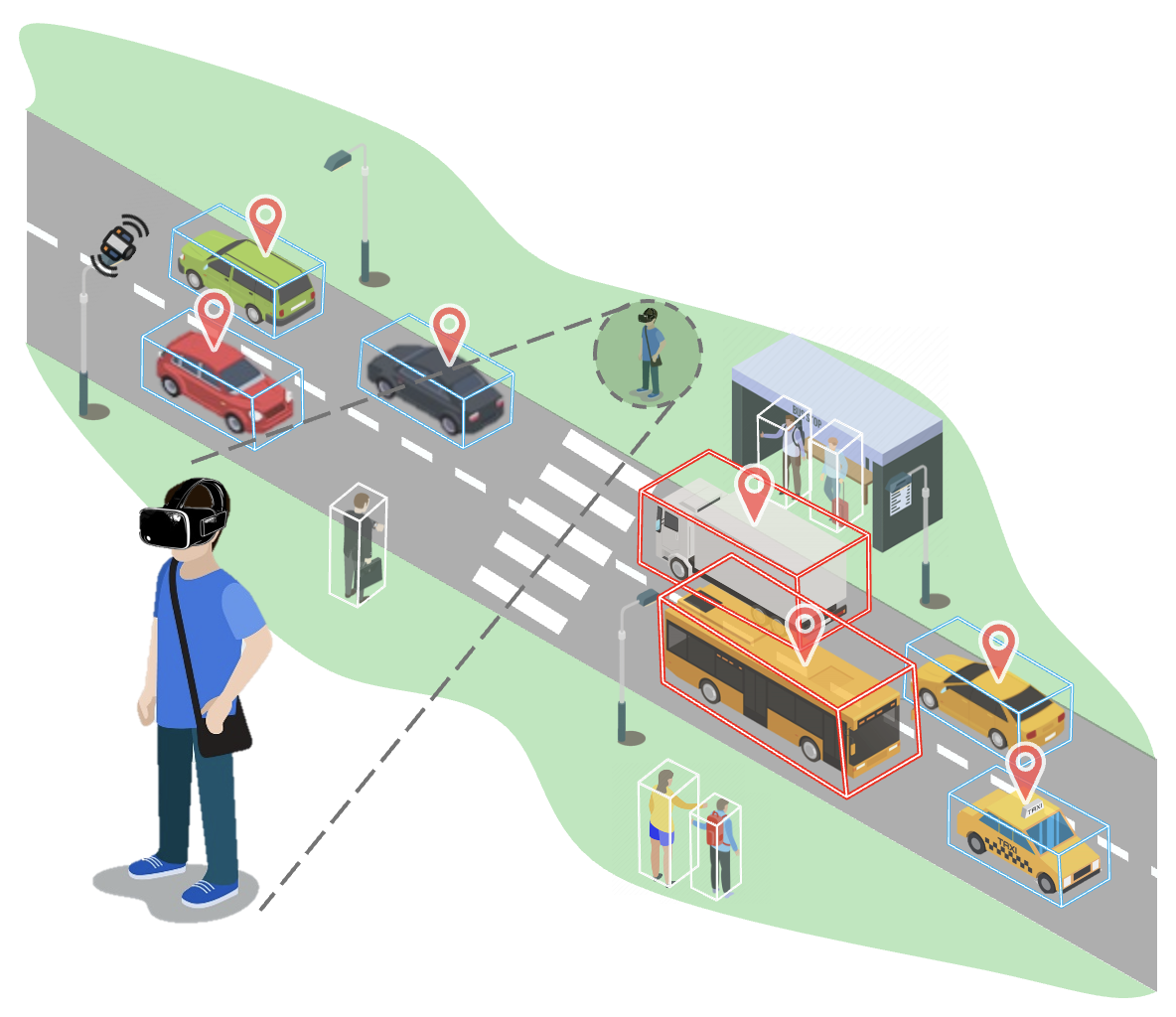
Summary: ARCAS is a real-time augmented reality (AR) system that integrates 3D LiDAR sensing with wearable headsets to enhance spatial awareness and prevent collisions between pedestrians and vehicles. The system operates through TCP/IP communication between a LiDAR processing server and AR headsets, detecting nearby objects and visualizing potential collision risks directly in the user’s field of view. It evolves from a single-user setup linking LiDAR perception with AR visualization to a coordinated framework that synchronizes multiple headsets and extends situational awareness to vehicle occupants. As a human-in-the-loop system, ARCAS allows users to perceive, anticipate, and respond to dynamic traffic hazards, bridging human perception and automated sensing for safer mixed traffic environments.
Keywords: Traffic Safety, Real-Time Sensing, Augmented Reality, Human–Vehicle Interaction
Tools:
• Hardware: Meta Quest Pro, Velodyne VLP-16 LiDAR, MicroStrain by HBK 6287-9960 IMU, Logitech Brio 501 Webcam, Server Laptop
• Software: Unity (C#), C++, Python
- Augmented Mobile Robots with Shared Perception in Uncertain Environments
📆 Sept. 2025 - Present
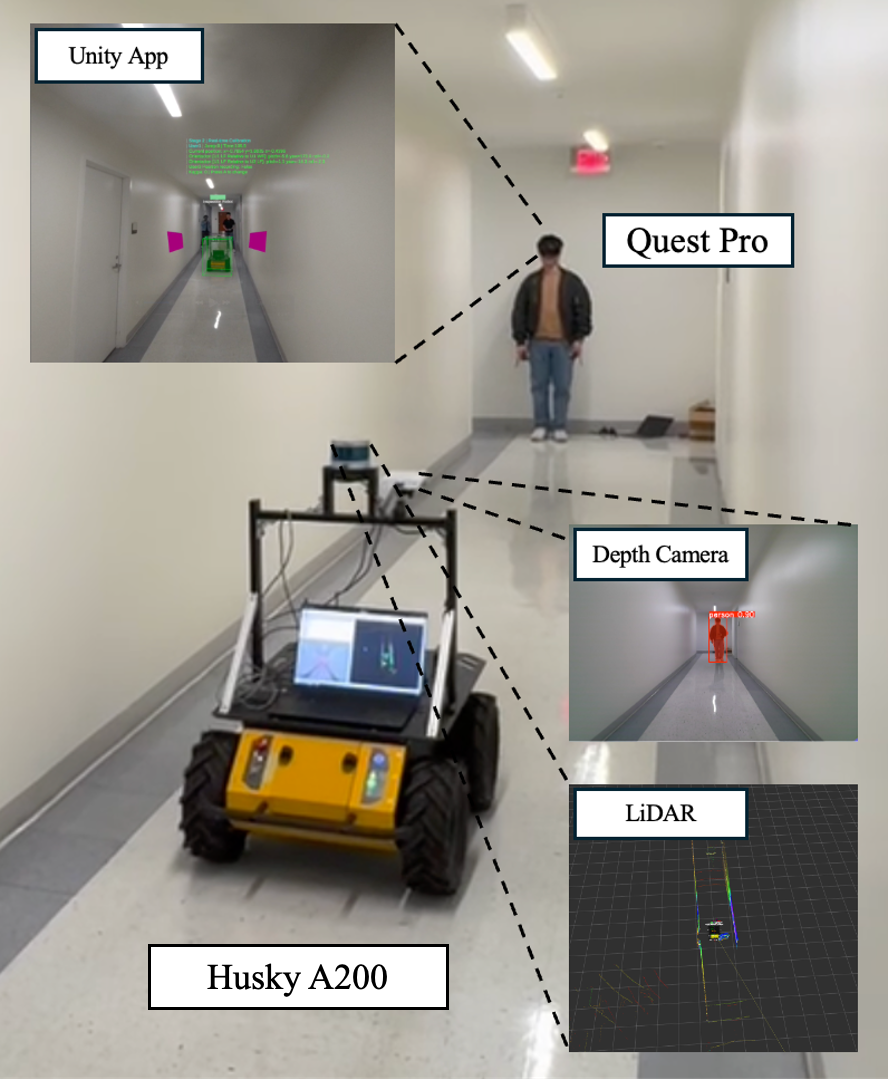
Summary: A human–robot collaboration framework that combines augmented reality (AR) and multi-modal sensing to achieve shared perception and intent understanding in uncertain, dynamic environments. The system enables mobile robots to visualize their surroundings—including obstacles, trajectories, and changes—through real-time AR interfaces, while interpreting human intent from gaze, gestures, and motion cues. By synchronizing AR headsets with robot perception data and creating an adaptive digital twin of the environment, the framework enhances transparency, situational awareness, and trust between humans and autonomous systems.
Keywords: Human–Robot Collaboration (HRC), Shared Perception, Augmented Reality, Explainable AI, Digital Twin
Tools:
• Hardware: Clearpath Husky A200, Velodyne VLP-16 3D LiDAR, Azure Kinect Depth Cameras, Meta Quest Pro (IMU/face/hand tracking), Server Laptop
• Software: Unity (C#), Python, ROS
📂 Recent Projects
- Bayesian Spatial Analysis of Bike-share Data for Cyclist Speed Zone Prediction in Austin, Texas
📆 Jan. 2025 - Apr. 2025
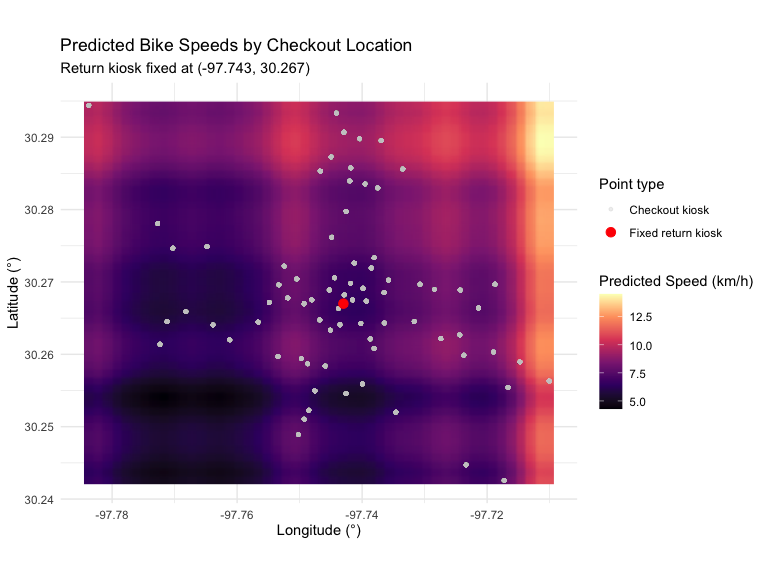
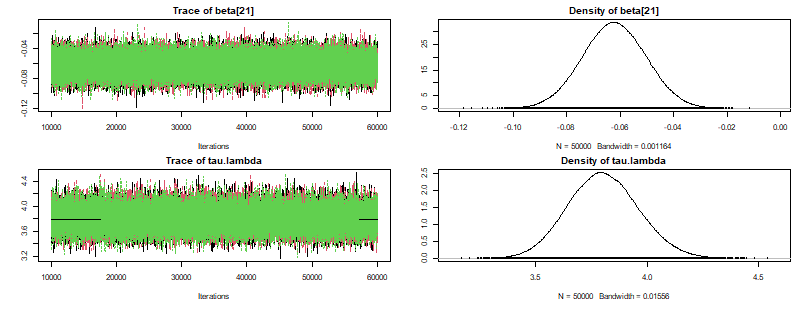
Summary: This project applies Bayesian hierarchical modeling to predict average cyclist speeds in Austin’s MetroBike network. Using two City of Austin datasets — MetroBike Trips and MetroBike Kiosk Locations — the study integrates spatial coordinates of checkout and return kiosks to generate a continuous “speed map” across the city. By identifying high and low average speed zones, the model highlights potentially hazardous or congested routes for cyclists and provides actionable insights for urban mobility planning.
- Weekly Traffic Flow Prediction using SARIMA: A Case Study of the Lamar–Manchaca Intersection in Austin, Texas
📆 Aug. 2024 - Dec. 2024
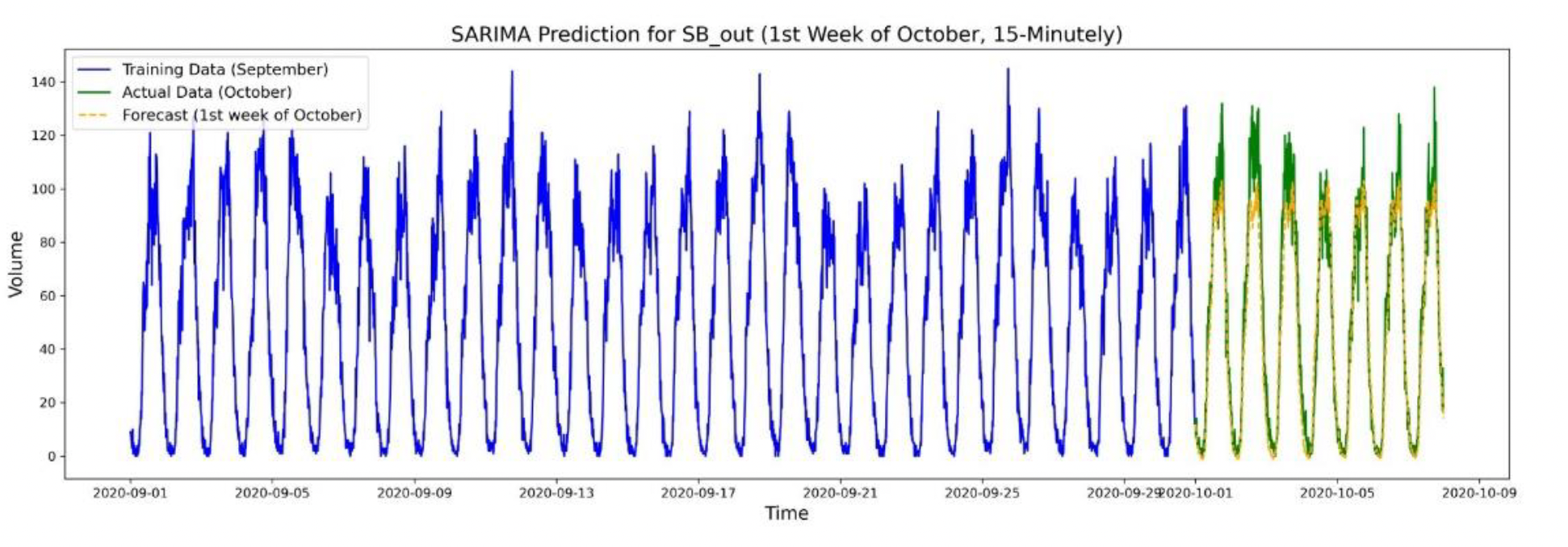
Summary:
This project analyzes short-term traffic flow patterns at the Lamar–Manchaca intersection in Austin using a Seasonal Autoregressive Integrated Moving Average (SARIMA) model. By applying 15-minute interval radar data from the City of Austin Open Data Portal, the study successfully forecasts one week of traffic volume trends, identifying recurring daily and weekly traffic patterns and peak-hour behaviors.
- Optimal Sites and Scale Selection for Micro Fulfillment Center (MFC) Construction in Seoul, Korea
📆 Sept. 2022 - Dec. 2022
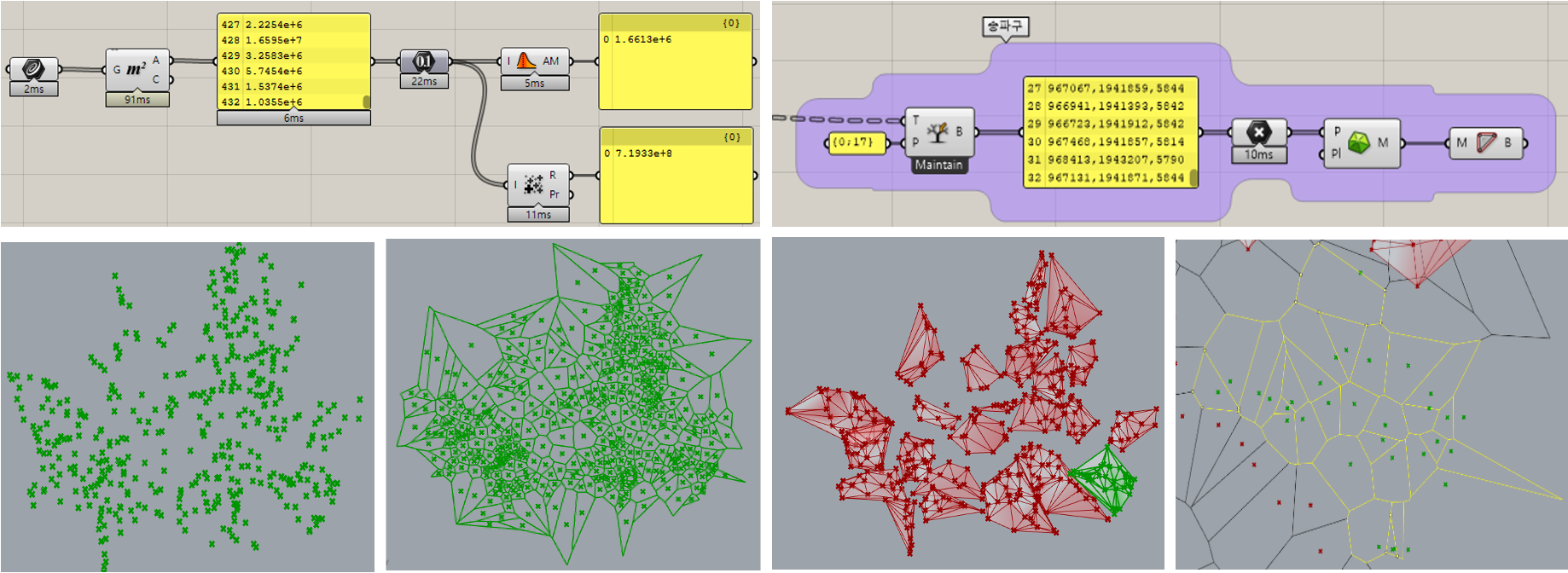
Summary:
This project proposes MES (Mobility–Energy–Shopping), a future-ready urban infrastructure that transforms underutilized gas station sites in Seoul into vertically integrated Micro Fulfillment Centers (MFCs) combined with EV charging stations. Using public datasets—including population density, parcel area, delivery volume, and the spatial distribution of gas stations—the study identifies optimal sites and determines the required MFC scale for each location. Through data-driven spatial analysis and algorithmic modeling, the project presents a new typology for urban logistics and electric-mobility infrastructure in high-density cities.
- Luxury Residential House Design in Itaewon-dong 258-66, Seoul, Korea
📆 Mar. 2022 - Jun. 2022
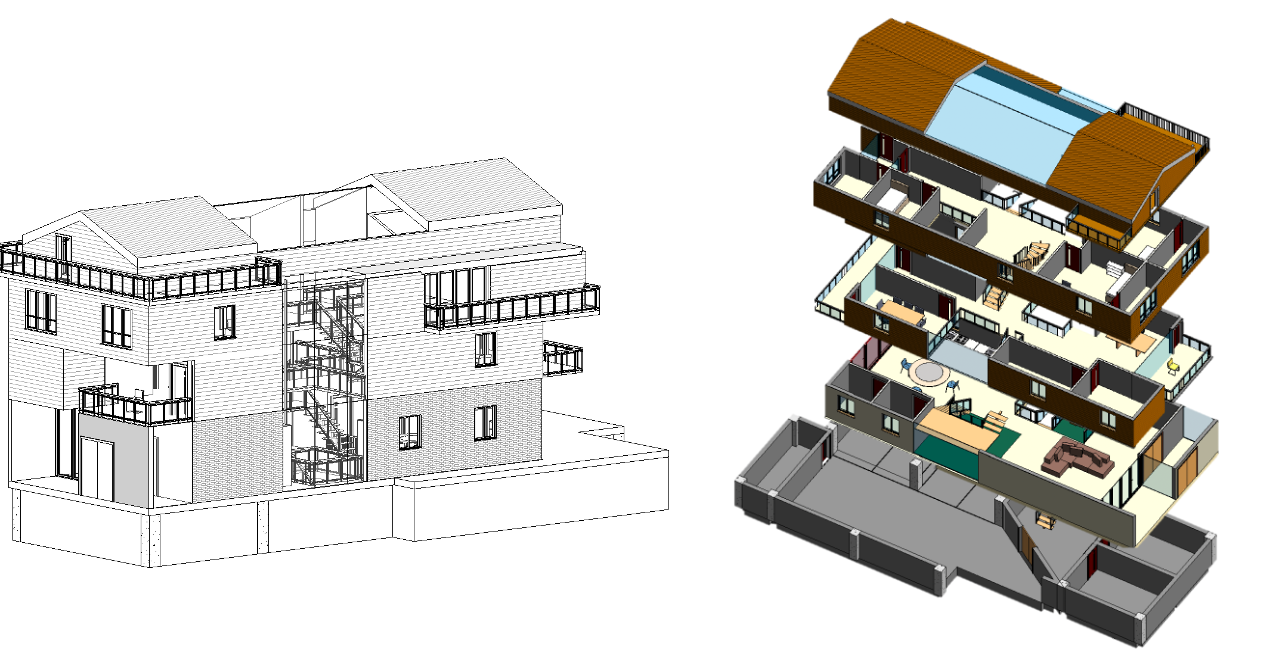
Summary:
Architectural design of a luxury family residence in Itaewon reflecting the lifestyle needs of a five-member household, using AutoCAD, Revit, and SketchUp for site analysis, legal review, and 3D visualization.
💻 Online Certification
-
Algorithm Specialization
Coursera · Stanford University
📆 Apr. 2025 – Jul. 2025
Greedy Algorithms, Minimum Spanning Trees, and Dynamic Programming
Graph Search, Shortest Paths, and Data Structures
Divide and Conquer, Sorting and Searching, and Randomized Algorithms -
Accelerated Computer Science Fundamentals Specialization
Coursera · University of Illinois Urbana-Champaign (UIUC)
📆 Dec. 2024 – Feb. 2025
Unordered Data Structures)
Ordered Data Structures
Object-Oriented Data Structures in C++ -
Introduction to Git and GitHub
Google Career Certificates
📆 Nov. 2024 -
Mathematics for Machine Learning and Data Science Specialization
DeepLearning.AI
📆 Sep. 2024 – Oct. 2024
Linear Algebra for Machine Learning and Data Science
Calculus for Machine Learning and Data Science
Probability & Statistics for Machine Learning & Data Science
📬 Contact
- Email: jsbyeon@utexas.edu
- LinkedIn: linkedin.com/in/jiseop-byeon
- GitHub: github.com/jiseop-byeon